![[Photo of the Author]](../../common/images/Guido-S.gif)
von Guido Socher (homepage)
Über den Autor:
Guido mag Linux weil es ein wirklich gutes System ist um eigene Hardware
zu entwickeln
Übersetzt ins Deutsche von:
Guido Socher (homepage)
Inhalt:
|
Ein digitales Thermometer oder rede I2C mit deinem Microcontroller
![[Illustration]](../../common/images2/article365/title_365.jpg)
Zusammenfassung:
Der Atmega8 Microcontroller von Atmel hat jede Menge digitale und analoge
Ein-/Ausgänge. Es ist das ideale Bauteil um Meßelektronik zu entwickeln.
In diesem Artikel werden wir sehen wie man einen Microcontroller mit einem
Linux PC über eine physikalische RS232 Schnittstelle verbinden kann, ohne
aufwendige Adapterschaltungen wie den MAX232 Chip zu benutzen.
_________________ _________________ _________________
|
Einführung
Eine Voraussetzung für diesen Artikel ist,
daß du die GCC AVR Programmierumgebung, wie in den dem Artikel
"Programmieren eines
AVR Microcontrollers mit GCC, libc 1.0.4" beschrieben,
installiert hast. Natürlich kannst du, um Ärger bei der
Installation zu vermeiden, auch die "AVR programming CD" von
http://shop.tuxgraphics.org/
benutzen. 
Wenn man so ein enorm mächtiges Bauteil wie einen Microcontroller
benutzt, um analoge oder digitale Signale zu messen, dann möchte
man natürlich Schnittstellen zum Auswerten haben und Befehle an
den Microcontroller schicken können. In allen vorangegangenen
Artikeln haben wir immer die RS232 Schnittstelle mit einem UART
zur Kommunikation benutzt. Der Nachteil ist hierbei, daß man
einen zusätzlichen MAX232 Chip und 4 Kondensatoren braucht. Atmel
schlägt sogar vor, daß man einen externen Quarz für den
Oszillator benutzen soll damit die UART Kommunikation zuverlässig
funktioniert. In jeden Fall sind das eine Menge extra
Bauteile.... und diese kann man vermeiden!
Die Menge an Daten, die zwischen PC und Microcontroller
übertragen werden müssen ist normalerweise klein (nur einige
Bytes). Die Übertragungsgeschwindigkeit spielt daher praktisch
keine Rolle. Das macht den I2C Bus attraktiv für diese
Aufgabe.
I2C (ausgesprochen "ei-squär-sie") ist ein bidirektionales
Kommunikationssystem mit nur zwei Drähten. Es wurden von Philips
entwickelt und sie haben sich den Namen schützen lassen. Daher
nennen es andere Hersteller nicht I2C. Bei Atmel heißt es TWI ("two
wire interface").
Viele von euch benutzen möglicherweise I2C in ihrem PC ohne es zu
wissen. Alle modernen Motherboards haben einen I2C-Bus um
Temperatursensoren, Lüftergeschwingigkeit, verfügbaren
Speicher... und alle möglichen anderen Daten zu lesen. Dieser
I2C-Bus ist leider am normalen PC nicht nach außen geführt (es
gibt außen keine physikalischen Anschluß dafür). Wir müssen uns
deshalb etwas neues überlegen.
Erst wollen wir aber sehen, wie das "two wire interface" (=TWI =
anderer Name für I2C) funktioniert.
Wie I2C/TWI funktioniert
Das Datenblatt des Atmega8 (siehe
unten) hat eine sehr detaillierte Beschreibung, die auf Seite 160
beginnt. Ich werde deshalb hier nur einen Überblick geben. Danach
solltest du in der Lage sein, das Datenblatt zu verstehen.
An einem I2C-Bus hat man immer einen "Master" und verschiedene
"Slaves". Die Kommunikation findet zu einem Zeitpunkt immer
zwischen dem Master und genau einem Slave statt. Der Master ist
das Gerät, das die Kommunikation beginnt und und den Bit-Takt
(clock) kontrolliert. Die zwei Drähte des I2C-Bus nennen sich SDA
(Datenleitung) und SCL (Clock line, Taktleitung). Jedes der
Geräte muß von einer separaten Stromversorgung (genau wie bei
normaler rs232 Kommunikation) gespeist werden. Die zwei Drähte des
Busses sind normalerweise über 4.7K Widerstände mit der logischen
Eins (+5V für 5V ICs) verbunden. Das ergibt eine elektrische
Veroderung zwischen den Geräten. Ein Gerät braucht dann nur die
Leitung auf GND ziehen, wenn es eine 0 übertragen will oder nichts
machen, wenn es eine 1 senden will.
Der Master beginnt einen Dialog indem er ein Bitmuster, das als
"start condition" gefolgt von der Adresse des Gerätes das er
ansprechen möchte, schickt. Jedes Gerät an dem Bus hat eine
eindeutige 7 Bit Adresse. Danach schickt der Master ein Bit das
anzeigt ob er lesen oder schreiben möchte. Der Slave (das
angesprochene Gerät) wird nun bestätigen, daß es den Master
verstanden hat und schickt ein ack-bit (ack wie acknowledge). Mit
anderen Worten wir haben jetzt 9 Datenbits auf dem Bus gesehen (7
Adressbits + read_bit + ack-bit):
| start | 7-bit slave adr | read_data bit | wait for ack | ... data comes here
Was kommt danach?
Als nächstes können wir Daten senden oder empfangen. Die Daten
sind immer ein Vielfaches von 8 Bit (1 Byte) und müssen durch ein
Ack-Bit bestätigt werden. Es werden also immer 9 Bit über den Bus
geschickt. Wenn die Kommunikation zu ende ist, schickt der Master
ein Bitmuster namens "stop condition". Mit anderen Worten der
Master muß wissen, wie viele Daten der Slave schicken möchte. Das
ist aber kein Problem, denn man kann diese Information immer in
den Dialog zwischen Master und Slave mit den Daten übertragen. In
unserem Fall werden wir z.B. das Null-Byte am Ende eines Strings
benutzen um anzuzeigen, daß der übertragene String zu ende
ist.
Die Daten auf dem SDA Draht sind immer solange gültig wie SCL 1
ist. SDA darf sich also nicht ändern während SCL 1 ist:
SDA H -\ /---\ /---\ /---\
L \-----/ \---/ \--------/ \------....
SCL H ----\ /-\ /-\ /-\ /-\ /-\
L \---/ \-----/ \---/ \--/ \--/ \-....
| START | 1 | 1 | 0 | 1 | 0 |
Das Beste an diesem Protokoll ist, daß man kein genaues
synchrones Taktsignal braucht. Das Protokoll wird immer noch
funktionieren wenn der Takt etwas wackelt (Jitter).
Genau diese Eigenschaft macht es möglich, I2C in einer ganz
normalen Benutzerapplikation zu implementieren. Man braucht kein
Kernelmodul oder spezielle Hardware (wie UART). Genial oder?
Die Idee
Wie schon gesagt können wir den PC internen I2C
Bus nicht benutzen. Stattdessen benutzen wir einfach einige
Leitungen der RS232 Schnittstelle. Unsere
Kommunikationsschnittstelle ist also immer noch RS232 aber wir
brauchen keine MAX232 Hardware, keine Kondensatoren, .... etc
Der schwierige Teil ist nun das I2C Protokoll neu in einer
Linuxapplikation zu implementieren und zu testen. Ich habe dafür
5 Wochen gebraucht bis es 100%ig funktionierte und du kannst es
einfach kopieren :-). Ich hoffe du erkennst den Wert dieses
Programms, wenn du es benutzt.
Als Anwendung für unser neues I2C Protokoll werden wir ein
Thermometer bauen. Du kannst natürlich auch irgend etwas anderes
messen oder einfach Lichter ein/aus-schalten. Es ist deine
Entscheidung.
In einem zweiten Artikel werden wir ein LCD-Display hinzufügen.
Mit anderen Worten es wird ein Thermometer bei dem man die
Temperatur über den Linux PC oder direkt über eine Anzeige
ablesen kann. Das Display kommt in einem zweiten Artikel um
diesen hier nicht zu überladen.

NTCs sind klein, billig und ausreichend genau |
Der Temperatursensor
Es gibt schon fertig kalibrierte
Temperatursensoren (einige von ihnen reden sogar I2C ;-) aber
diese sind recht teuer. NTCs sind viel billiger und fast genauso
gut selbst ohne Kalibrierung. Wenn man sie kalibriert kann man
Genauigkeiten bis hinter dem Dezimalpunkt erreichen.
Ein Problem von NTCs ist ihre Nichtlinearität. Es ist aber
eigentlich nur eine Frage der Halbleiterphysik hier die richtige
Formel zu finden und diese nicht lineare Kurve zu korrigieren.
Der Microcontroller ist ein kleiner Computer und mathematische
Operationen sind überhaupt kein Problem. NTCs sind
temperaturabhängige Widerstände. Der Widerstandswert R eines NTCs
bei einer gegebenen Temperatur ist:
 T oder Tc ist die Temperatur, die wir suchen. Rn ist der
Widerstandswert bei 25'C. Man kann NTCs mit 4.7K, 10K, ...
kaufen. Rn ist dieser Wert.
T oder Tc ist die Temperatur, die wir suchen. Rn ist der
Widerstandswert bei 25'C. Man kann NTCs mit 4.7K, 10K, ...
kaufen. Rn ist dieser Wert.
Die Schaltung
Schaltplan. Klick auf den Plan um eine genauere Ansicht
zu erhalten.
|
Nun haben wir alles um das digitale Thermometer zu bauen.
Wir nehmen zwei NTCs. Einen für innen und einen für die
Außentemperatur. Du kannst noch mehr Sensoren anschließen.
(conn3, Pin PC2 ist z.B frei). In dem Schaltbild sieht man schon
das LCD-Display. Ich wollte vermeiden, daß für den nächsten
Artikel wieder eine neue Schaltung gebaut werden muß.
In der Schaltung findet sich eine ein LED. Das kostet nicht viel
und ist sehr nützlich zum debuggen. Ich habe es oft benutzt als
ich die I2C State-machine für die Kommunikation zwischen PC und
Microcontroller entwickelt habe. Im normalen Betrieb lassen wir
die LED einfach blinken um zu zeigen, daß Messwerte genommen
werden.
Die Schaltung ist ansonsten ganz einfach. Der
Analogdigitalwandler in dem Microcontroller wird benutzt um den
Spannungsabfall an einem NTC zu messen. Dieser wird dann in einen
Temperaturwert übersetzt.
Der Atmega8 hat verschiedene Möglichkeiten die Referenzspannung
des Analogdigitalwandlers zu wählen. Man kann entweder
5V (AVcc) oder einen interen 2.56V Referenz benutzen. Für die
Innentemperatur brauchen wir einen viel kleineren Bereich. +10'C
bis +40'C sollten ausreichen. Wir nehmen daher hier die 2.56V
Referenz und erhalten die doppelte Genauigkeit, da jetzt 1024
mögliche digitale Werte auf 0-2.56V verteilt sind. Das ergibt
eine Genauigkeit von 2.5mV (genauer als die meisten digitalen
Voltmeter!).
Der CD Anschluß an der RS232 Schnittstelle ist ein Eingang und
wir schließen ihn daher an die SDA Leitung des I2C Bus an. DTR
und RTS sind Ausgänge. Wenn der PC Daten-bits auf den Bus gibt,
dann ändert er einfach DTR. Der I2C Master, hier der Linux PC,
kontrolliert die SCL (Takt) Leitung. Mit anderen Worten SCL ist
ein Ausgang an dem RS232 Anschluß.
Der 78L05 wird benutzt um eine stabile Stromversorgung und eine
Referenzspannung zu erhalten. Du kannst daher fast jede Art von
Stromversorgung benutzen. DC oder AC zwischen 7.5V ond 12V. 9V
ist eine gute Wahl.
Die Platine erstellen

tuxgraphics.org verkauft alle nötigen Bauteile zusammen mir
einer geätzten Platine. |
Man kann natürlich auch die Lochrasterplatine aus dem
vorangegangenen Artikel benutzen. Dazu muß man die LED auf Pin
11 umlöten und die neuen Bauteile hinzufügen.
Wenn du jedoch eine Schaltung bauen möchtest, die auch gut
aussieht, dann macht es mehr Sinn eine neue Platine zu ätzen,
denn diese Schaltung ist einfach viel komplexer als die
Testschaltung aus dem ersten Artikel. Nachdem ich Iznogood's
Linuxfocus Artikel über gEDA gelesen hatte, beschloss ich dieses
Mal gEDA anstelle von Eagel zu benutzen. gschem, das
Schaltplanzeichenprogramm von gEDA ist sehr gut. Die Bibliothek
der vorhandenen Symbole ist wesentlich kleiner als bei Eagle und
so mußte ich mein eigenes Symbol für den Atmega8 entwerfen, aber
ging erstaunlich einfach. Viel problematischer ist pcb, das
Programm zum Zeichnen der Platine. Wenn man vorher Eagle benutzt
hat wird man zunächst irritiert sein, daß sich die
Gummibandverbindungen von den Bauteilen entfernen lassen. Um
sicher zu sein, daß das richtige Gummiband an dem richtigen
Bauteil hängt muß man sie von Zeit zu Zeit neu erzeugen
(Connects->Optimize rats-nest). Man sollte sich auch sehr
sicher sein, daß der Schaltplan komplett ist, denn nachträglich
Änderungen werden nur halb manuell übertragen und es einfach
dabei Fehler zu machen. 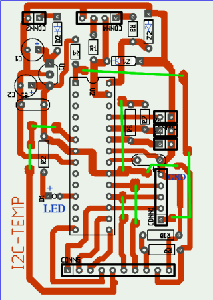
Ich benutzte den orangen Layer zum zeichnen. Irgendwie
erzeugten die anderen verfügbaren Farben einfach keine Ausgabe
beim Drucken. Das Problem ist jedoch, das dieser orange Layer
offenbar auf der Seite liegt, wo die Bauteile sind. Man muß das
Ergebnis also spiegeln. Letztendlich entschloss ich mich, die
wesentlichen Teile des Layout mit pcb und den Rest mit gimp zu
zeichnen.
Dank shop.tuxgraphics.org brauchst
du nicht mit gefährlichen Chemikalien zu hantieren oder in
verschiedenen Geschäften nach den richtigen Komponenten suchen.
tuxgraphics verkauft alle Teile, die man für diesen Artikel
braucht.
Der Aufbau
Beim Zusammenbau sollte man auf die Teile
achten, bei denen die Polarität wichtig ist:
Elektrolytkoindenstoren, Dioden, Z-Dioden, 78L05, LED und
Microcontroller.
Bevor man den Microcontroller in den Sockel steckt sollte man die
Stromversorgung mit einem Meßgerät testen. Falls diese nicht
funktioniert bekommt man nicht nur falsche Werte, sondern zerstört
möglicherweise auch den Microcontroller. Als nächstes kann man
die Schaltung an den RS232 Anschluß des Linux PCs anschließen un
mit dem i2c_rs232_pintest Programm die verschiedenen
Signalkombinationen auf den SDA und SCL Anschlüssen zu testen.
i2c_rs232_pintest -d 1 -c 1
i2c_rs232_pintest -d 0 -c 1
i2c_rs232_pintest -d 1 -c 0
Dieses Programm setzt die Spannungspegel auf den RTS (als SCL
genutzt, Option -c) und DTR (als SDA genutzt, Optio -d) an der
RS232 Schnittstelle. RS232 hat Spannungen von +/- 10V. Hinter den
Z-Dioden sollte man jedoch nur -0.7 für eine logische Null und
+4-5V für eine logische Eins messen.
Erst wenn diese Tests bestanden sind, sollte man den
Microcontroller in den Sockel setzen.
I2C Kommunikation nutzen.
Lade das linuxI2Ctemp tar.gz
File herunter (siehe Referenzen) und entpacke es. Die I2C
Kommunikation ist in 2 Dateien implementiert:
i2c_avr.c -- die i2c Zustandsmaschine für den atmega8
i2c_m.c -- das komplette i2c Protokoll für die Linuxseite.
Ich habe dem atmega8 die Slave Adresse "3" gegeben. Um den
String "hello" and den atmega8 zu senden würde man folgende C
Funktionen ausführen:
address_slave(3,0); // tell the slave that we will send something
i2c_tx_string("hello");
i2cstop(); // release the i2c bus
Auf der Microcontrollerseite würde man den String mit
der folgenden Funktion empfangen:
i2c_get_received_data(rec_buf);
Ganz einfach. Das lesen von Daten aus dem Microcontroller
geht ähnlich.
Wie warm ist es?
Um den Code für den Microcontroller zu
kompilieren und zu laden, sind die folgenden Befehle nötig:
make
make load
Um die Programme i2c_rs232_pintest und i2ctemp_linux zu
compilieren tippt man:
make i2c_rs232_pintest
make i2ctemp_linux
... oder man kann die vorkompilierten Versionen aus dem "bin"
Verzeichnis benutzen.
Um Temperaturwerte zu lesen nimmt man einfach:
i2ctemp_linux
... und die Werte für Innen- und Außentemperatur werden auf
den Bildschirm gedruckt. Um diese Daten über einen Webserver zur
Verfügung zu stellen empfehle ich nicht das i2ctemp_linux Programm
direkt vom Webserver aus laufen zu lassen, da es recht langsam ist.
Besser ist es einen cron-Job zu schreiben, der regelmäßig eine
html-Datei erzeugt. Ein Beispiel dafür findet sich in der README
Datei des linuxI2Ctemp Paketes.
Zusammenfassung
Das I2C Protokoll braucht sehr wenig extra
Hardware und ist optimiert für kleine Datenmengen. Das ist genau
das, was wir brauchen, wenn wir Meßdaten von dem Microcontroller
lesen. Eine elegante Lösung.
In diesem Artikel lag der Schwerpunkt auf der Hardware. Wenn dir
dieser Artikel gefallen hat, dann schreibe ich noch einen zweiten
Artikel, in dem die Software beschrieben wird. Speziell wie die
Analogdigitalwandlung und die Implementation des I2C Protokolls
funktionieren. In diesem zweiten Artikel kommen auch das LCD
Display und Celsius nach Fahrenheit Konvertierung hinzu.
Referenzen
Talkback für diesen Artikel
Jeder Artikel hat seine eigene Seite für Kommentare und Rückmeldungen. Auf dieser Seite kann jeder eigene Kommentare abgeben und die Kommentare anderer Leser sehen:
2005-03-25, generated by lfparser version 2.52